What is a Rotary Encoder?
A rotary encoder is a device that measures angular position and speed by generating digital pulses when rotated. It can also detect rotation direction.

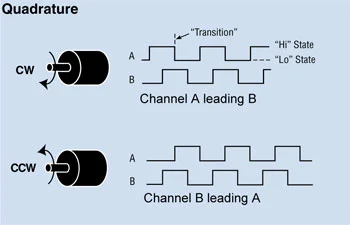
How Does it Work?
The encoder generates pulses using a quadrature system with two channels (A and B) that are offset by 90°. By analyzing these pulses, we can determine rotation direction and distance.
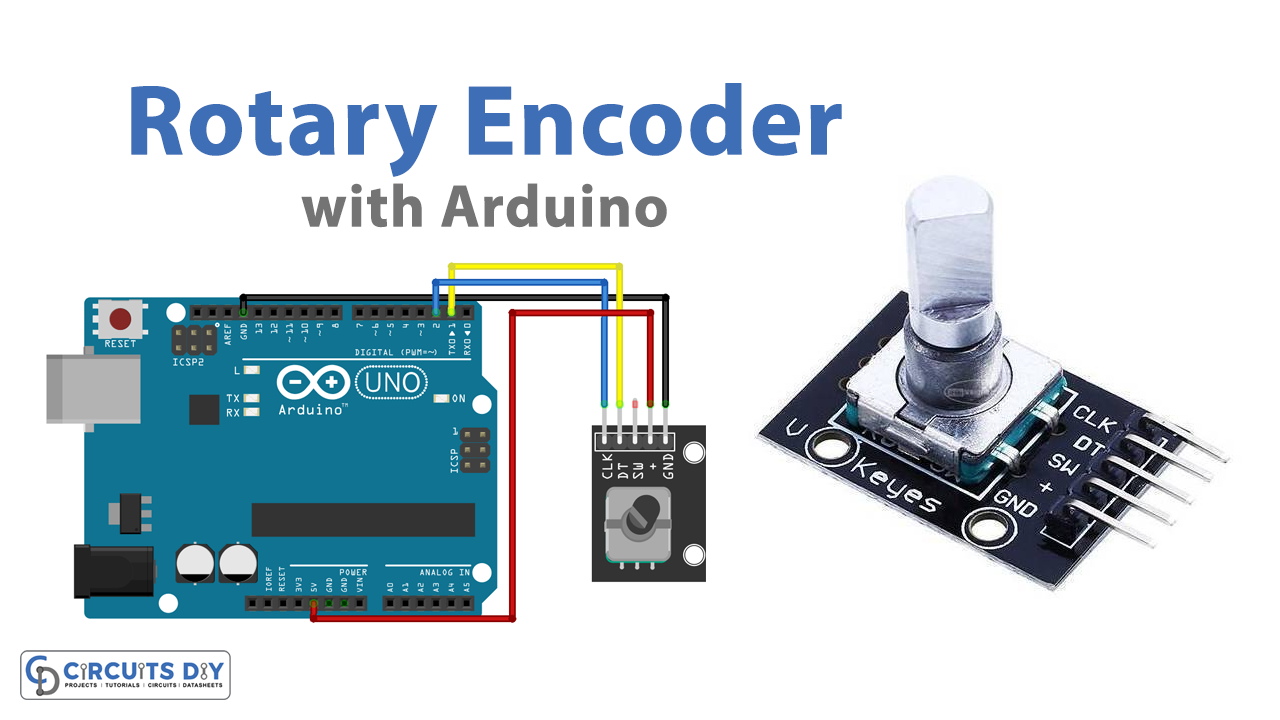
Wiring Diagram
To connect the rotary encoder to Arduino, follow the wiring diagram below:
Code Examples
1. Single/Double Precision (Polling)
const int channelPinA = 9;
const int channelPinB = 10;
unsigned char stateChannelA;
unsigned char stateChannelB;
unsigned char prevStateChannelA = 0;
const int maxSteps = 255;
int value = 0;
int prevValue = 0;
void setup() {
Serial.begin(9600);
pinMode(channelPinA, INPUT);
pinMode(channelPinB, INPUT);
}
void loop() {
stateChannelA = digitalRead(channelPinA);
stateChannelB = digitalRead(channelPinB);
if (stateChannelA != prevStateChannelA) {
if (stateChannelB) {
if (value < maxSteps) value++;
} else {
if (value > 0) value--;
}
prevStateChannelA = stateChannelA;
if (prevValue != value) {
prevValue = value;
Serial.println(value);
}
}
}
2. Double Precision (Interrupt)
const int channelPinA = 2;
const int channelPinB = 10;
volatile int ISRCounter = 0;
int counter = 0;
void setup() {
Serial.begin(9600);
pinMode(channelPinA, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(channelPinA), doEncode, CHANGE);
}
void loop() {
if (counter != ISRCounter) {
counter = ISRCounter;
Serial.println(counter);
}
}
void doEncode() {
if (digitalRead(channelPinA) == digitalRead(channelPinB)) {
ISRCounter++;
} else {
ISRCounter--;
}
}
Important Notes
Using interrupts improves precision but consumes interrupt pins. Use polling for simple applications where performance is less critical.