What is a Continuous Rotation Servo?
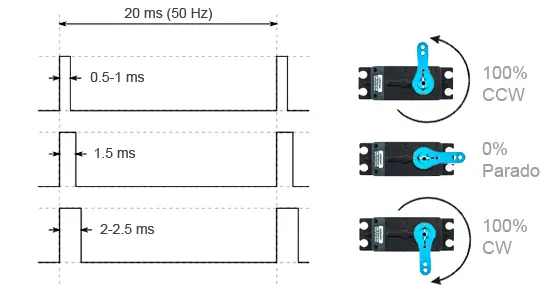
A continuous rotation servo is similar to a standard servo but controls speed and direction instead of position. It can rotate continuously in both directions.
These servos are ideal for driving wheels in robots, controlling rotating platforms, and other applications requiring speed control.
Price
- DM-S0090D: Torque: 1.5kg•cm, Speed: 0.08 sec/60º, Price: €3.10
- SM-S4306R: Torque: 5kg•cm, Speed: 0.13 sec/60º, Price: €3.70
- SM-S4315R: Torque: 14.5kg•cm, Speed: 0.13 sec/60º, Price: €7.00
Assembly Diagram
The connection for a continuous rotation servo is identical to that of a standard servo:
- Brown/Black: GND
- Red: Vcc (4.8V to 7.2V)
- Orange/White: Signal (PWM)

When using an external power supply, ensure all GNDs are connected together.
Code Examples
Basic Speed Control
This example demonstrates how to stop the servo, rotate it at full speed in one direction, and then in the opposite direction:
#include
Servo myservo; // create the servo object
int vel = 0; // servo speed
void setup() {
myservo.attach(9); // link the servo to digital pin 9
}
void loop() {
// Stopped servo (equivalent to 90º angle)
vel = 90;
myservo.write(vel);
delay(1500);
// 100% CW servo (equivalent to 180º angle)
vel = 180;
myservo.write(vel);
delay(1500);
// 100% CCW servo (equivalent to 0º angle)
vel = 0;
myservo.write(vel);
delay(1500);
}
Conclusion
Continuous rotation servos are a simple way to achieve speed and direction control in your projects. They are perfect for small robots, rotating platforms, and more. Use the provided code as a starting point for your designs.