What is the 28BYJ-48 Motor and ULN2003 Driver?
The 28BYJ-48 is a unipolar stepper motor with a built-in reducer, offering high precision with 4096 steps per revolution. The ULN2003 is a driver board with Darlington transistors for controlling this motor efficiently.

Features
- Stepper motor: 5.625° per step (4096 steps/revolution with the reducer).
- Voltage: 5V or 12V (check the motor label).
- Torque: 3N•cm (0.3Kgf•cm).
- Driver: ULN2003 for high-current control.
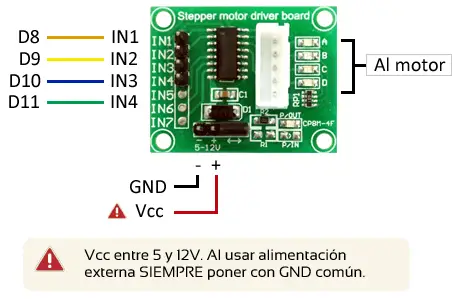
Assembly Diagram
Connect the 28BYJ-48 to the ULN2003 driver board and wire it to Arduino as follows:
- IN1-IN4: Arduino digital pins (D8-D11 in the example).
- GND: Connect to Arduino GND.
- Vcc: 5V or external power supply matching your motor's voltage.
Code Example
This code demonstrates how to control the 28BYJ-48 motor using half-step sequences:
// Pin definitions
const int motorPin1 = 8; // IN1
const int motorPin2 = 9; // IN2
const int motorPin3 = 10; // IN3
const int motorPin4 = 11; // IN4
int motorSpeed = 1200; // Speed in microseconds
int stepCounter = 0; // Current step
const int stepsPerRev = 4076; // Steps per revolution
// Half-step sequence
const int numSteps = 8;
const int stepsLookup[8] = { B1000, B1100, B0100, B0110, B0010, B0011, B0001, B1001 };
void setup() {
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
}
void loop() {
for (int i = 0; i < stepsPerRev; i++) {
clockwise();
delayMicroseconds(motorSpeed);
}
delay(1000);
for (int i = 0; i < stepsPerRev; i++) {
anticlockwise();
delayMicroseconds(motorSpeed);
}
delay(1000);
}
void clockwise() {
stepCounter++;
if (stepCounter >= numSteps) stepCounter = 0;
setOutput(stepCounter);
}
void anticlockwise() {
stepCounter--;
if (stepCounter < 0) stepCounter = numSteps - 1;
setOutput(stepCounter);
}
void setOutput(int step) {
digitalWrite(motorPin1, bitRead(stepsLookup[step], 0));
digitalWrite(motorPin2, bitRead(stepsLookup[step], 1));
digitalWrite(motorPin3, bitRead(stepsLookup[step], 2));
digitalWrite(motorPin4, bitRead(stepsLookup[step], 3));
}